Congratulations on the successful HORIZON-MSCA-DN grant!
We are thrilled to announce that our new project, "Secure AI and Digital Twin Empowered Smart Internet-of-Energy," has been officially approved for funding.
Read moreThe Intelligent Systems Lab (ISL) at NTNU is a center for research and education in digitalization, autonomous maritime systems, and machine intelligence for engineering. We combine first-principles models and data-driven methods to solve high-impact problems in ocean operations and robotics.
We are thrilled to announce that our new project, "Secure AI and Digital Twin Empowered Smart Internet-of-Energy," has been officially approved for funding.
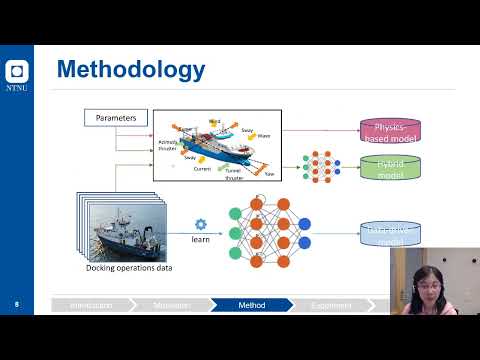
Read moreRecent work shows improved prediction by combining physics-based models with machine learning.
Read moreHis paper on using computer vision for fish behavior detection has been accepted for publication in Applied Ocean Research.
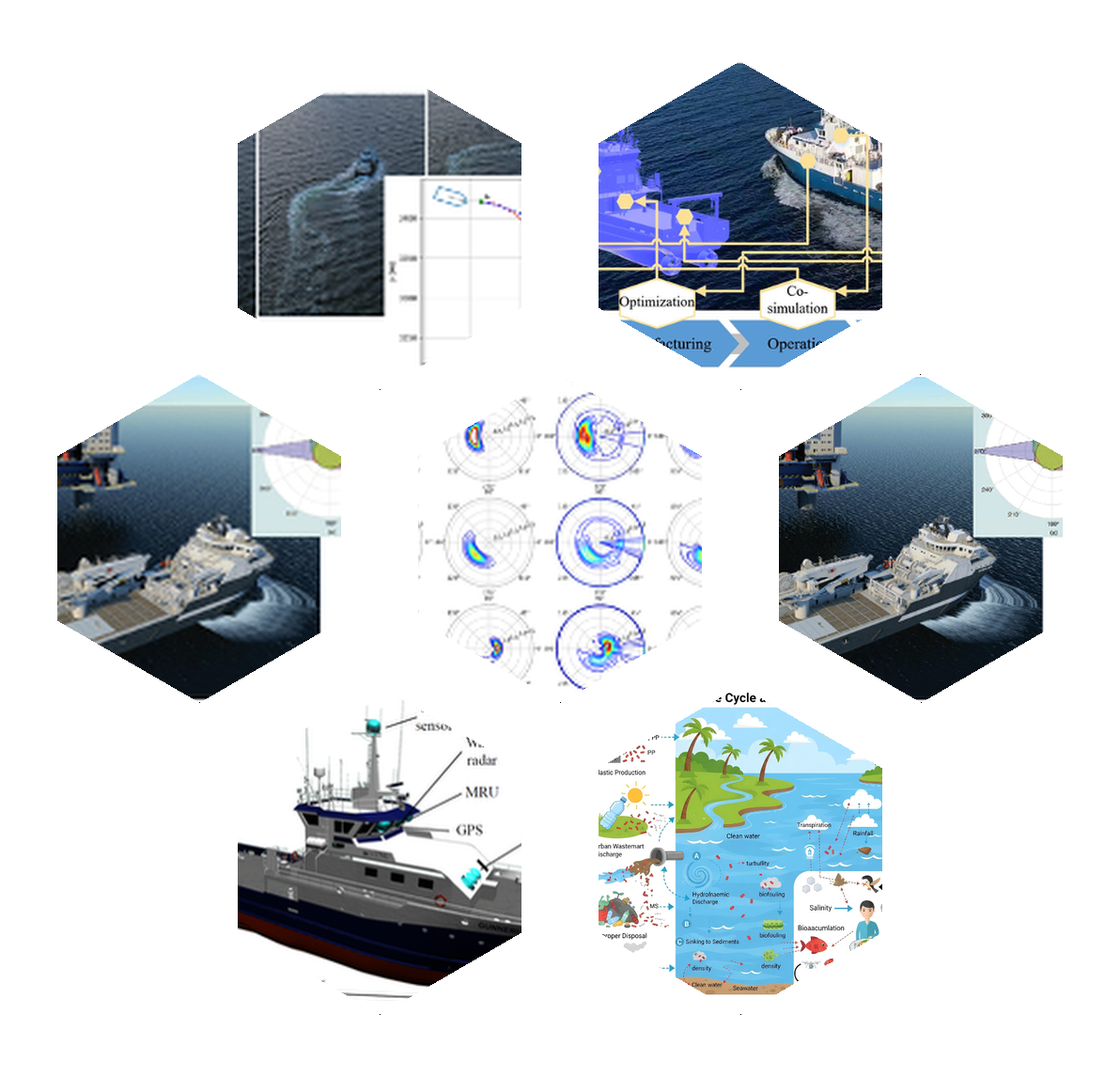
Read moreThe first research focus of the team is on digitalization of advanced marine systems, a field known for its multidisciplinary nature encompassing hydrodynamics, thermal analysis, control, etc. While conventional approaches typically involve the separate simulation of these subsystems, the team leading by Prof. Zhang pioneered the development of an integrated co-simulation framework for marine surface vessels, seamlessly incorporating over 10 multidisciplinary subsystems. The research works extended to the creation of a digital twin for marine vessels in real operation as the first, enabling remote monitoring and control of these complex systems. The second distinct research in the lab is in the area of physics-data cooperative hybrid modelling and control of marine vessels considering environmental and operational uncertainties. Unlike classic model-based or pure data-driven approaches, there have been few attempts to build predictive models by organically incorporating them together in a holistic manner. One of the primary reasons is that the model complexity due to frequent interaction with water results in an inaccurate description of marine vehicle dynamics. Furthermore, uncertainties and environmental disturbance including as operational conditional changing, wind and waves, add extra complexity and hinder obtaining ship dynamic model with high fidelity.


“Toward Remote Control Center for Marine Operation: A Case Study of R/V Gunnerus”

“Physics-informed Data-driven Approach for Ship Docking Prediction”

“An Effective Model-based Thruster Failure Detection Method for Dynamically Positioned Ships”

“Design of Neural Circuit for Sidewinding of Snake-like Robots”
Our group includes professors, postdoctoral fellows, and Ph.D. candidates working across maritime AI and robotics.
See full team